ASENKRON MOTORLARIN YAPISI VE ÖZELLİKLERİ
Asenkron motorlar, endustride en fazla kullanılan elektrik makinalarıdir. Calisma ilkesi bakımından asenkron motorlara enduksiyon motorları da denir. Asenkron motorların calısmaları sırasında elektrik arkı meydana gelmez. Ayrıca diğer elektrik makinalarina gore daha ucuzlardır ve bakıma daha az ihtiyac gösterirler. Bu özellikler, asenkron motorların endüstride en çok kullanilan motorlar olmalarina sebep olmuştur. Asenkron makinalar endustride genellikle motor olarak calıstırılırlar, fakat belirli koşulların sağlanması durumunda generatör olarak da calıstırılabilirler. Asenkron makinaları senkron makinalardan ayıran en büyük özellik, dönme hızının sabit olmayışıdır. Bu hız motor olarak calışmada senkron hızdan kücüktür. Makinanın asenkron oluşu bu özelliğinden ileri gelmektedir.
YAPISI
Asenkron motorlar genel olarak stator ve rotor olmak üzere iki kısımdan yapılmışlardır. Stator, asenkron motorun duran kısmıdır. Rotor ise dönen kısmıdır. Asenkron motorun rotoru, kısa devreli rotor (sincap kafesli rotor) ve sargılı rotor (bilezikli rotor) olmak üzere iki çeşittir. Asenkron motor, rotorun yapım biçimine göre bilezikli ve kafesli asenkron motor olarak tanımlanır.
Asenkron Motorların Çalışma Prensibi:
3 fazlı 2 kutuplu bir asenkron motora 3 fazlı alternatif akım uygulandığı zaman statördeki sargılar dönen bir manyetik alan oluştururlar.Bu manyetik alan rotordaki iletken çubuklar üzerinde bir indüksiyon akımının oluşmasına sebep olur.Bu indüksiyon akımı da rotorun dönen manyetik alanla aynı yönde dönmesine sebep olan karşılayıcı bir manyetik alan oluşturur.
Rotorun devir sayısı daima dönen manyetik alanın devir sayısından küçük olmak zorundadır.Aksi taktirde rotorun devir sayısı arttıkça döner alanın rotordaki iletken çubukları kesmesi azalacağından bu çubuklar dönen alanı karşılayabilecek manyetik alanı meydana getiremezler.

ASENKRON MOTORLARA YOL VERME
5.1. Asenkron Motorlara Yolverme Metodları
Asenkron motorlar üç fazlı sistemden beslenir ve sargılan 220 V veya 380 V değerindeki gerilime göre sarılırlar. Özel durumlarda sargılara uygulanacak gerilim farklı değerlerde olabilir. Eğer motor tam yük altında üçgen çalışacak şekilde imal edildiyse, motorun stator sargıları direkt olarak 380 V gerilime göre sarılırlar. Tam yük altında yıldız çalışacak şekilde imal edilen motorların stator sargıları ise 220 V gerilime göre sarılırlar. Sargılara uygulanan bu gerilim, sargı empedanslarının küçük olması nedeniyle kalkınma anında çok fazla akım çekilmesine neden olur. Motor ilk kalkınma anında rotor dönmediği için sekonderi kısadevre edilmiş bir trafo gibi çalışır. Dolayısıyla rotor devresinden ve buna bağlı olarak stator devresinden kalkınma ,anında yaklaşık olarak tam yük akımının 4-8 katı kadar bir akım çekilir. Kalkınma torkları ise tam yük torkunun 2-3.5 katı kadardır. Bundan dolayı asenkron motorlar genellikle boşta çalıştırılıp, anma hız değerlerine ulaşıldıktan sonra yüklenirler. Asenkron motorların kalkınma anında fazla akım çekmesi kumanda devresinde kullanılacak elemanlar ve iletkenlerin maliyetini artıracağından, bazı yöntemler yardımıyla kalkınma akımı belirli değerlerde tutulur. Bu yöntemlerin ana prensibi, stator sargılarına düşük gerilim
uygulamaktır. Bu maksatla aşağıdaki metodlar kullanılır:
1. Motora yıldız-üçgen yol verilir.
2. Stator sargılarına ön direnç bağlanır.
3. Stator sargıları ayarlı üç fazlı bir güç kaynağından beslenir.
4. Rotoru sargılı asenkron motorlarda, rotor sargılarına harici dirençler bağlanır. Sincap kafesli asenkron motorlarda ise rotor yapıları uygun şekilde imal edilerek kalkınma anında rotor etkin direncinin büyük olması sağlanır.
5.2. Motora Yıldız-üçgen Yol verme
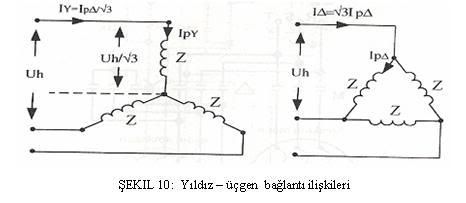
Yıldız-üçgen yol verilen motorlarda, motorun stator sargıları üçgen bağlantıdaki maruz kalacağı gerilim değerinin etkisinden ve aşırı akım ve güç çekmesinden ilk kalkınma anında kurtulmaktadır. Motorun yıldız veya üçgen çalıştırılması durumunda akım, gerilim, güç ve tork ifadeleri Şekil 10 gösterilmiştir.
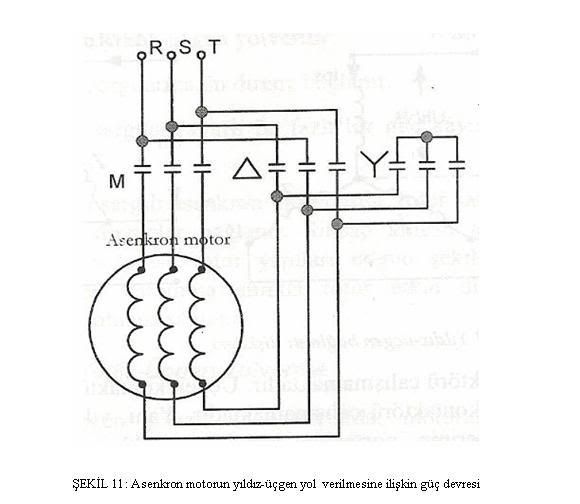
Şekil 10' da bir asenkron motora yıldız-üçgen yol verme güç devresi verilmiştir. Bu devrede, motor önce yıldız, sonra da üçgen çalışmaya geçer. Yıldız çalışmada M ve Y kontaktörleri, üçgen çalışmada ise M ve ∆ kontaktörleri kapalı durumdadır. Yıldız-üçgen bağlantıyı gerçekleştirecek , kumanda devresi burada gösterilmemiştir. Ancak kumanda devresinin tasarlanmasında, yıldız kontaktörü çalışırken üçgen kontaktörü çalışmamaktadır.